Exponencial Matricial: definição, propriedades e aplicações
Ref: [1]: David Luenberger. Introduction to Dynamic Systems: Theory, Models and Applications, John Wiley and Sons, Inc. New York, 1979.
Def.: seja
![]() uma matriz diagonalizável, onde
uma matriz diagonalizável, onde

 .
.
![$\displaystyle e^{A} = X \left[ \begin{array}{cccc}
e^{\lambda_1} & & & \\
& e...
...a_2} & & \\
& & \dots & \\
& & & e^{\lambda_n}
\end{array} \right] X^{-1} $](img9.gif)

![$\displaystyle e^A = X \left[ \begin{array}{cccc}
\displaystyle \sum_{k=0}^{\inf...
...aystyle \sum_{k=0}^{\infty} \frac{\lambda_n^k}{k!}
\end{array} \right] X^{-1} $](img11.gif)

Assim:, podemos definir ![]() , para matrizes
, para matrizes
![]() quaisquer (não necessariamente diagonalizáveis) usando a expressão
acima, que pode-se mostrar que é sempre convergente.
quaisquer (não necessariamente diagonalizáveis) usando a expressão
acima, que pode-se mostrar que é sempre convergente.
Propriedades de ![]() :
:
![$e^{-A} = [e^A]^{-1}$](img16.gif) (matriz inversa);
(matriz inversa);
Aplicação: solução de sistemas autônomos de equações diferenciais de primeira ordem
Considere um sistema de equações diferenciais de primeira ordem e coeficientes constantes




![$\displaystyle
A + \frac{A^2t}{1!} + \frac{A^3 t^2}{2!} +
\frac{A^4 t^3}{3!} ...
...2t^2}{2!} + \frac{A^3 t^3}{3!} +
\frac{A^4 t^4}{4!} + \dots \right] = A e^{At} $](img28.gif)
 .
.

![$\displaystyle \left[ \begin{array}{c}
\dot{u}_1 \\ \dot{u}_2 \end{array} \right...
...end{array} \right] =
A \left[ \begin{array}{c}
u_1 \\ u_2 \end{array} \right] $](img36.gif)
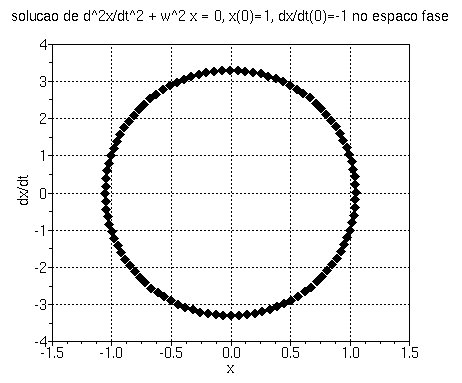
-->w=%pi; A = [0 1;-w*w 0], u0=[1;-1]
-->for t=0:.02:8
--> ut=expm(A*t)*u0; plot2d( ut(1),ut(2),-4);
-->end
-->xgrid
-->xlabel('x'),ylabel('dx/dt')
-->title('solucao de d^2x/dt^2 + w^2 x = 0, x(0)=1, dx/dt(0)=-1 no espaco fase')
o que produz o gráfico abaixo: